Kinetic Energy For A Particle:
The kinetic energy for a particle is given by the following scalar equation:
 …………………(1)
…………………(1)
Where:
T is the kinetic energy of the particle with respect to ground (an inertial reference frame)
m is the mass of the particle
v is the velocity of the particle, with respect to ground.
Kinetic Energy For A Rigid Body:
Planar Motion
For a rigid body experiencing planar (two-dimensional) motion, the kinetic energy is given by the following general scalar equation:
 ………………(2)
………………(2)
Where:
T is the kinetic energy of the rigid body with respect to ground
m is the mass of the rigid body
vG is the velocity of the center of mass G of the rigid body, with respect to ground
IG is the moment of inertia of the rigid body about an axis passing through the center of mass G, and perpendicular to the plane of motion
w is the angular velocity of the rigid body, with respect to ground
The figure below illustrates the general case where a rigid body is experiencing planar (two-dimensional) motion.
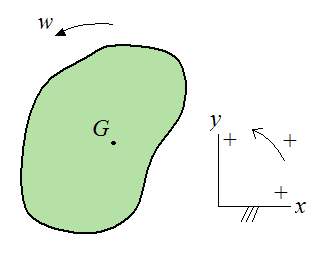
Note in equation (2) that the kinetic energy of the rigid body consists of two parts: The kinetic energy due to the velocity of the center of mass, and the kinetic energy due to rotation.
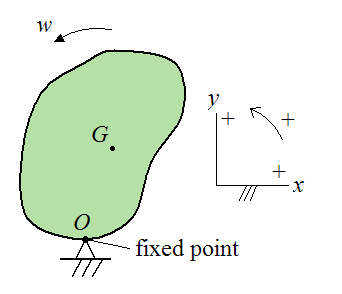
If the rigid body is rotating about a fixed point O that is attached to ground, we can express the kinetic energy as:
Where:
Io is the moment of inertia of the rigid body about an axis passing through the fixed point O, and perpendicular to the plane of motion
w is the angular velocity of the rigid body, with respect to ground
The figure below illustrates the case where a rigid body is experiencing planar (two-dimensional) motion, and is rotating about a fixed point O.
Three Dimensional Motion:
For general three-dimensional motion, the kinetic energy of a rigid body is given by the following general scalar equation:

Where:
T is the kinetic energy of the rigid body with respect to ground
m is the mass of the rigid body
vG is the velocity of the center of mass G of the rigid body, with respect to ground
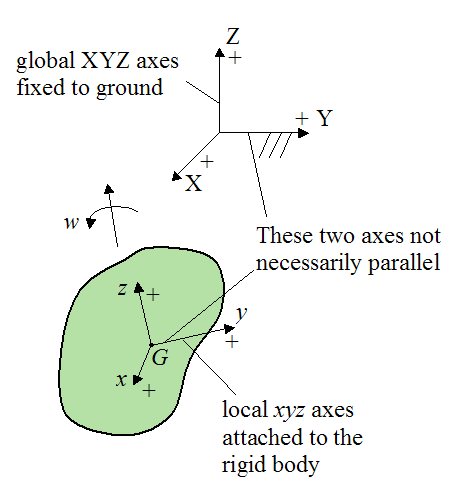
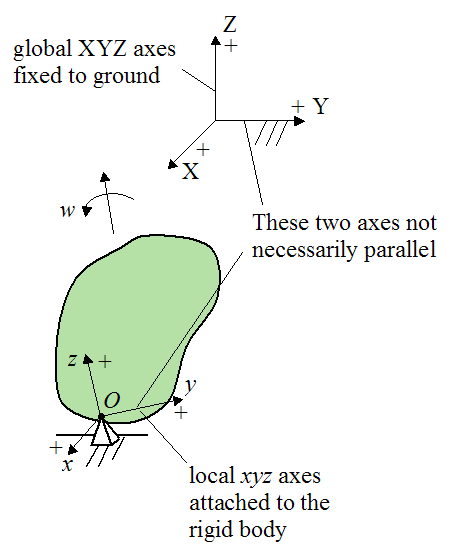
wx, wy, wz are the components of the angular velocity of the rigid body with respect to ground, and resolved along the local xyz axes (see figure below). To calculate these components, one must first determine the angular velocity vector of the rigid body with respect to the global XYZ axes, and then resolve this vector along the x, y, z directions to find the components wx, wy, wz. This is often done using trigonometry.
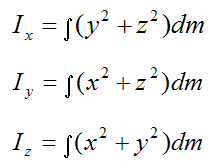
Ix is the moment of inertia of the rigid body about the local x-axis, passing through the center of mass G (see figure below)
Iy is the moment of inertia of the rigid body about the local y-axis, passing through the center of mass G (see figure below)
Iz is the moment of inertia of the rigid body about the local z-axis, passing through the center of mass G (see figure below)
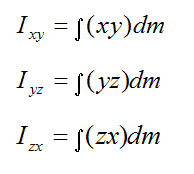
The moments of inertia Ix, Iy, Iz are the principal moments of inertia. This means that the local xyz axis is oriented such that the products of inertia Ixy, Iyz, Izx all equal zero. For every rigid body, principal directions of inertia exist (where Ix, Iy, Iz are the principal moments of inertia). If a body has two or three planes of symmetry, the principal directions of inertia will be aligned with these planes.
The moment of inertia terms are given by
The product of inertia terms are given by
Note that for equation (4) the local xyz axes has its origin at the center of mass G of the rigid body.
Also note in equation (4) that the kinetic energy of the rigid body consists of two parts: The kinetic energy due to the velocity of the center of mass, and the kinetic energy due to rotation.
If the rigid body has a fixed point O that is attached to ground, we can give an alternate scalar equation for the kinetic energy of the rigid body:
The variables are the same here as for equation (4). The only difference is that the local xyz axes has its origin at the fixed point O on the rigid body (instead of point G), as shown below. This means that the moment of inertia terms are calculated relative to point O (instead of point G).
Note that in equations (2)-(5), if we assume that the rigid body has negligible dimensions (where the inertia terms are close to zero), then the equations reduce to the kinetic energy equation for a particle — equation (1).
The scalar equations (2)-(5) can be used when solving problems involving energy calculations. For planar (two-dimensional) motion use equation (2) or (3). For general three-dimensional motion use equation (4) or (5).
